Soldaduras, sim.
Ensaiadas as posições dos componentes principais, iremos de seguida efectuar as ligações eléctricas.
Num drone de construção amadora, o aeromodelista deparar-se-á com algumas soldaduras de estanho simples.

A imagem ilustra a escala da montagem. A Controladora tem uma furação “micro” de 20×20 mm e os parafusos usados têm medida M2
Ligações da câmara de FPV
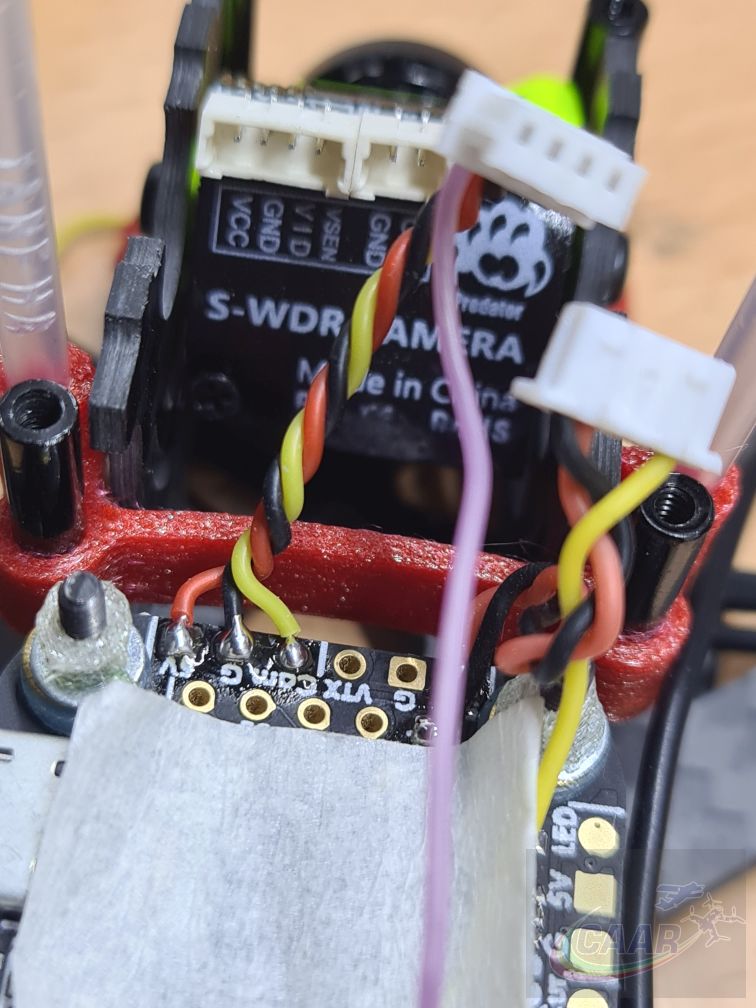
Uma fita “de pintor” protege a FC durante as soldaduras. Neste detalhe vemos a ligação da câmara de video.
Ao sinal de vídeo é injectada informação On-Screen-Display
No OSD é comum apresentar-se a tensão da bateria principal, os modos de voo, identificação do piloto, entre outros
parâmetros de interesse.
Ensaio de vídeo
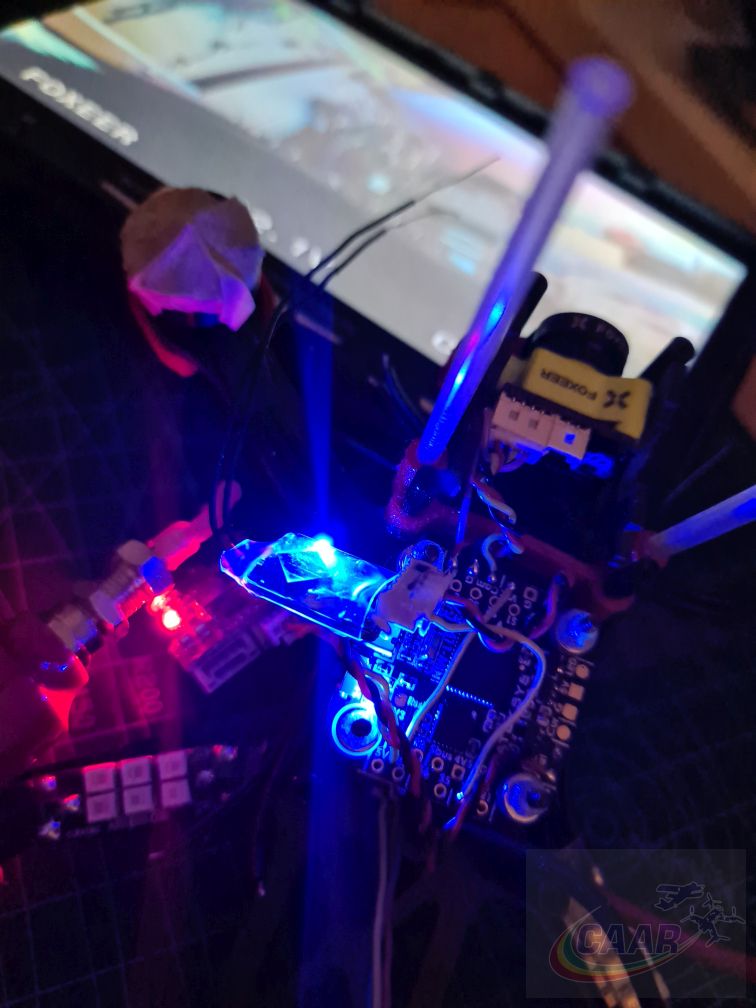
Fazemos um ensaio de funcionalidade do VTx (Video Transmitter). Em segundo plano note-se a imagem real captada pela câmara FPV.

Assegurada a principal funcionalidade (transmissão de vídeo) podemos concluir as ligações em falta: o sinal para os motores, tipicamente quatro. Recordamos que a cada motor ligamos três fios: as três fases em alternância. O ESC comanda estas fases de acordo com a frequência comandada por este fio de sinal.
Na fita protectora dos motores assinalamos o sentido pretendido de rotação do mesmo, que definiremos de seguida.
Sinal de controle dos motores
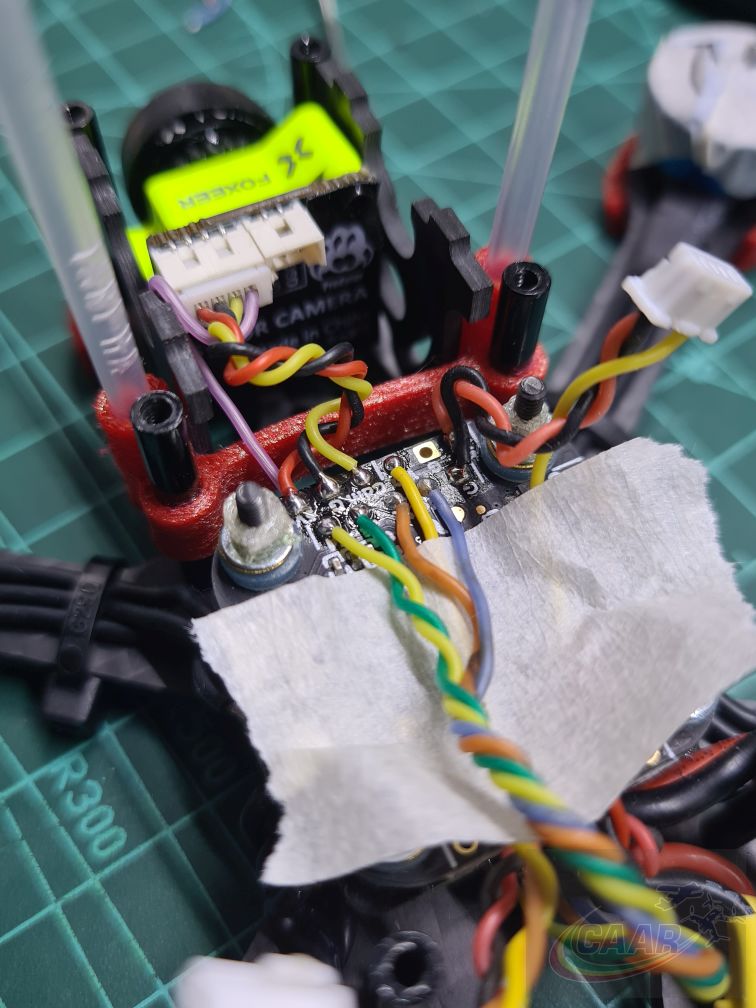
Qual é qual?
Vemos em detalhe as ligações da câmara (alimentação e Entrada de Vídeo na FC, os quatro fios de sinal que comandam ao ESC a cadência de cada motor, respectivamente, e a Saída de Vídeo para o VTx, o transmissor de vídeo.
Sentido de rotação

Configuramos agora alguns detalhes relativos à operaçãos dos motores – mudando parâmetros nos ESC. O detalhe principal é assegurar o sentido correcto de rotação dos motores.
“Fechar” o drone
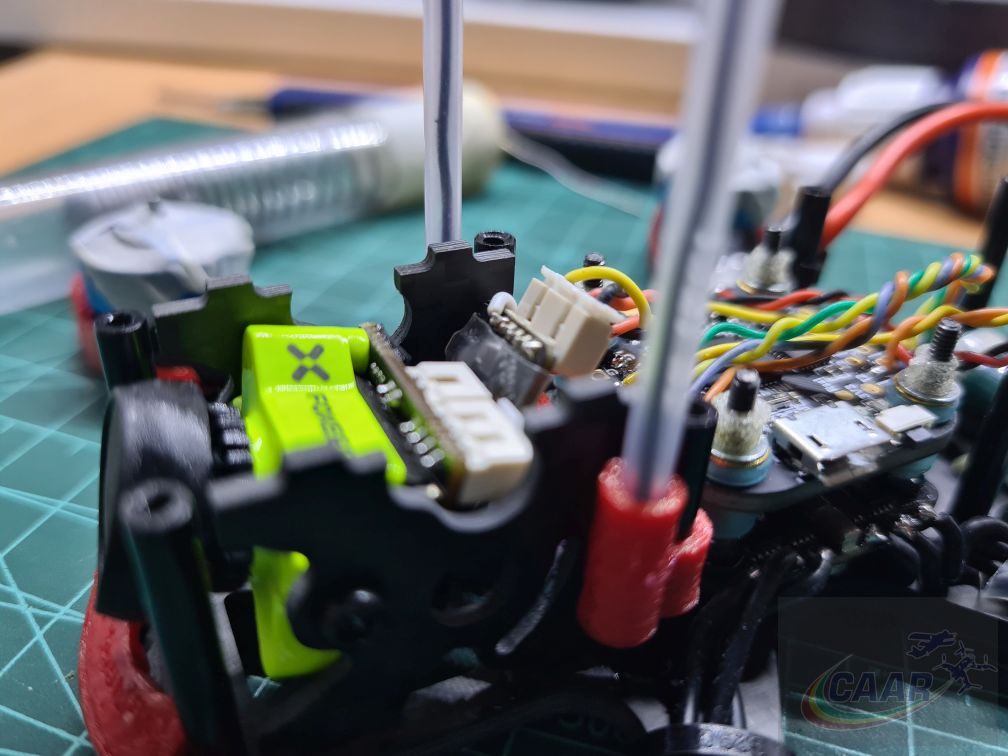
E assim chegamos ao momento de “fechar o drone”, estando todas as funcionalidades ensaiadas na bancada.
Esta é a arquitectura de um drone “analógico”. No entanto, actualmente é já comum usarem-se frequências de rádio de 868MHz na Europa ou soluções de vídeo digital em HD.