O principal retorno de satisfação de um drone FPV é, como o termo indica – a visão na primeira pessoa. O FPV transmite ao piloto uma sensação de voo. Todos os componentes garantem essa função principal, de manter o sistema de vídeo sob controle do piloto.
A frame / Estrutura

A frame mantém os componentes no devido lugar. A dimensão dos braços e as furações são tidas em consideração na escolha da mesma.
A sua geometria é determinante no seu comportamento dinâmico
Diferentes geometrias valorizam curvas rápidas, agilidade em todos os eixos por igual, ou um comportamento mais estável e controlável.
Os motores
Os motores propulsionam o modelo. Estão em constantes ajustes de rotação, com vista a manter a atitude de voo determinada pelo piloto.

A escolha da sua dimensão obedece a critérios como:
- O seu peso
- A sua força em baixa rotação
- A sua contribuição para a velocidade máxima
- As características das hélices que se pretendem usar
- O seu consumo eléctrico
Estes motores usam 3 fios, são motores trifásicos. São controlados por um variador ou ESC (Electronic Speed Controller). O ESC determina quais fios têm o comportamento de Fase e de Neutro, num dado instante no tempo. Esta alternância de fases acontece muitas vezes por segundo. O efeito magnético imprime assim rotação.
O receptor de rádio
Usamos um receptor comum na frequência dos 2.4GHz.
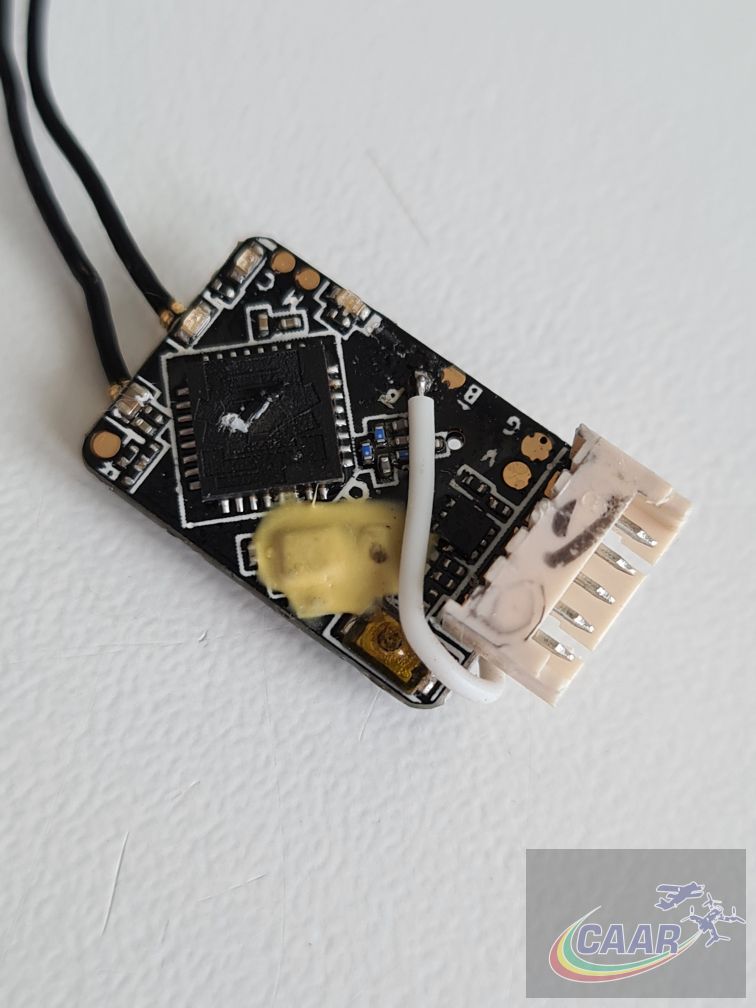
Usa duas antenas pois é um duplo receptor, por redundância e segurança.
A controladora de voo
A controlada de voo é o ponto por onde todas as operações essenciais convergem. É um micro-computador com capacidade para:
- Saber qual a atitude/posição actual
- Saber, através do receptor referido, qual a atitude/posição comandada pelo piloto
- Comandar a rotação dos motores, com vista a atingir a atitude comandada
- Incluir, na imagem de vídeo a ser enviada ao piloto, detalhes importantes sobre o estado de alguns parâmetros de voo
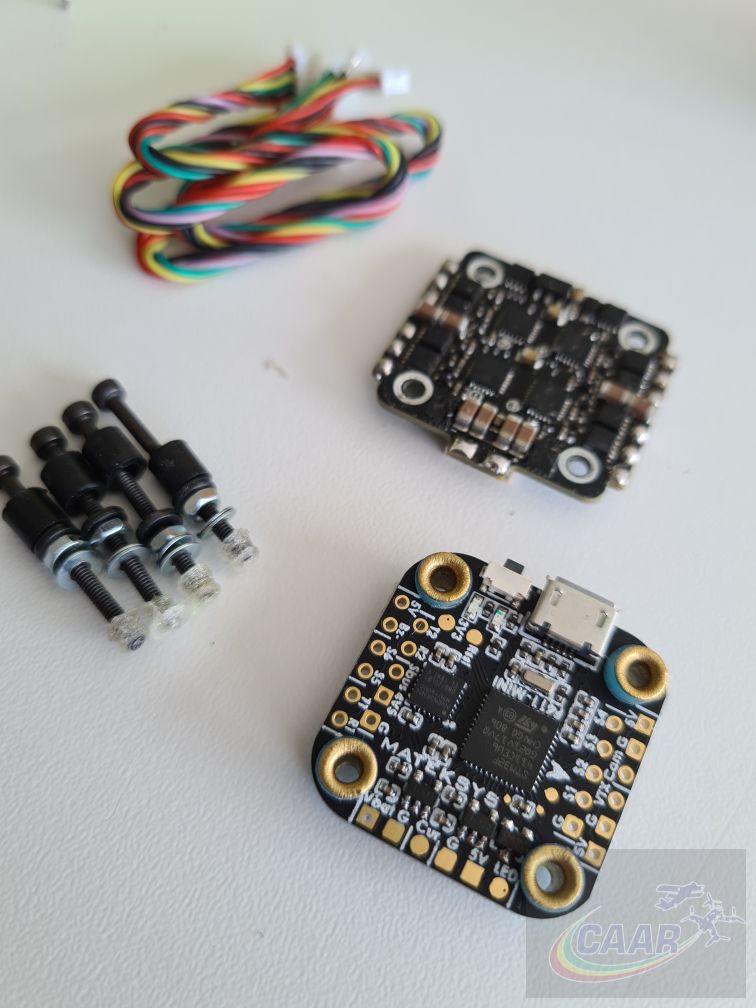
Este micro-computador executa um programa, um sistema operativo que implementa as funcionalidades elementares.
Betaflight is flight controller software (firmware) used to fly multi-rotor craft and fixed wing craft
Usaremos o Betaflight.
Pedro Manuel de Oliveira Abrunhosa
Feb 28, 2021 -
Está bem explicado e de fácil compreensão.
Muito bom.
Luís Carapito
Feb 28, 2021 -
Explicado qb com adequado detalhe.
Muito bom. Keep on the excellent job 👌